10. Overview of Weld Settings
Tutorial
This tutorial covers the 4 types of settings available to adjust in the weld settings.
This tutorial is only a brief introduction and overview to these settings, and is the first of a series of tutorials explaining how you can specifically alter these settings to benefit your welding projects.
Prerequisites and Resources
Before starting with the tutorial, ensure to have the Yaskawa Motoman example cell downloaded and imported into Verbotics Weld. This cell is available to download from the examples page on our website.
Video Tutorial
Step by Step Guide
Step 1 - Process Settings
General Process Settings
Let’s start this tutorial by creating a new project and selecting the “yaskawa motoman example cell”. Once loaded into the project, we’ll navigate to the top ribbon and click on Weld Settings.
The first type of setting we’ll look at is the Weld Process Settings, so go ahead and click on Weld Process to select the setting type, then click the PLUS symbol to create a new settings profile.
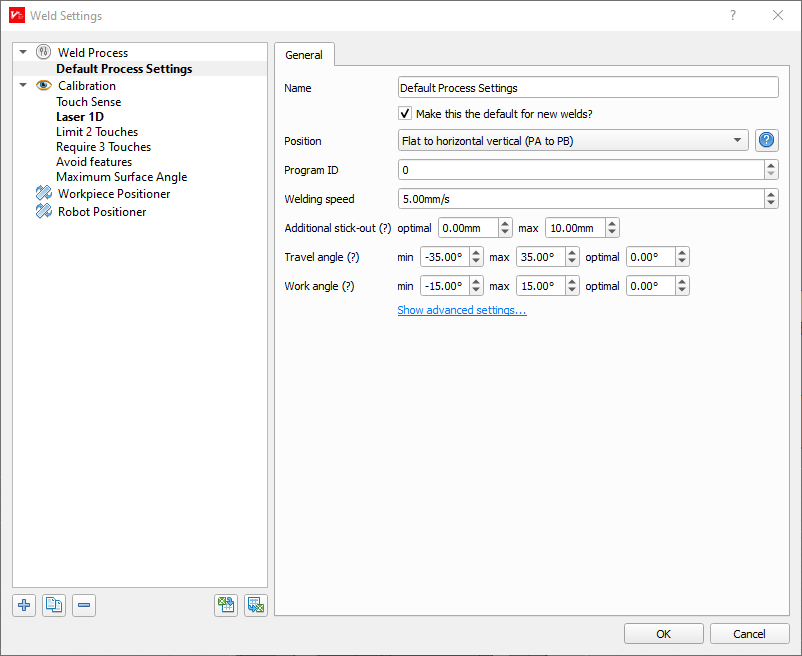
General Process Settings
On the right, you should now see all the available options, the general process settings allow you to:
Set a program ID
Adjust the welding speed
Adjusting additional stick-out
Define ranges and a optimal value for the travel and work angle.
Advanced Process Settings
We can also trigger the advanced settings by clicking on the blue text labelled Show advanced settings… which you can find at the bottom of the general options.

Advanced Process Settings
These settings are much more specific and enable additional control of properties including:
Voltage
Current
Wire feed speed
Wire rotation.
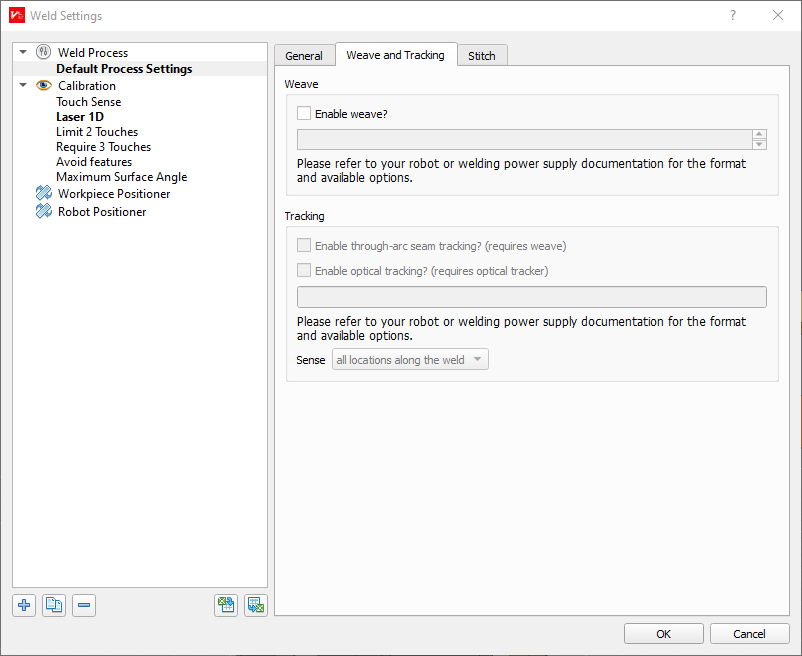
This also will enable two additional tabs next to general, these being weave and tracking, and stitch:
Weave settings will allow you to enable the weaving weld technique for your robot, where you can then add weaving parameters, through-arc seam tracking and calibration limiting.
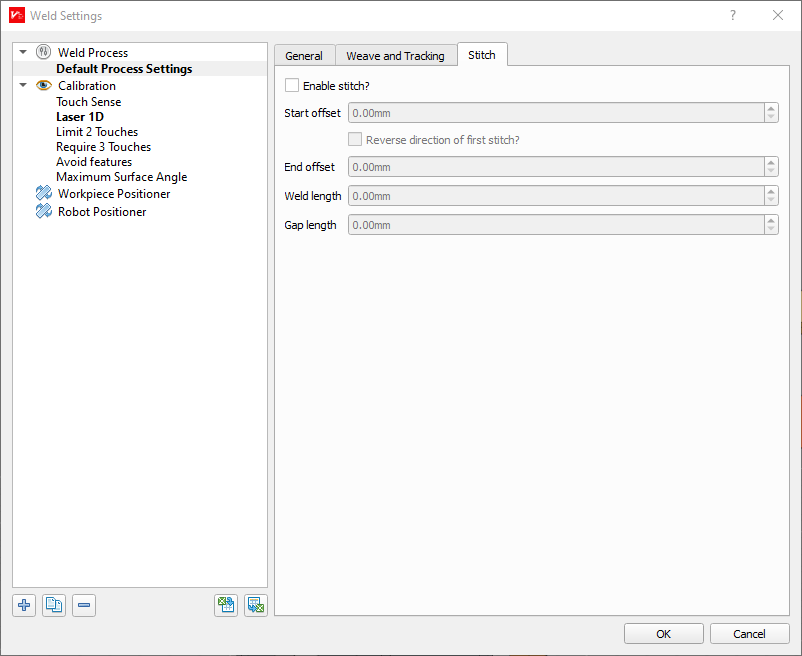
Stitch weld settings similarly allow you to enable your robot to stitch, where you can then specify offsets, weld lengths and gap lengths.
Weave and Tracking |
Stitch |
|
|
Step 2 - Calibration Settings
The next section of weld settings covers calibration and the methods in which your robot can perform calibration motions. While still in weld settings, select the calibration weld setting type then click the PLUS button to create a new calibration settings profile.
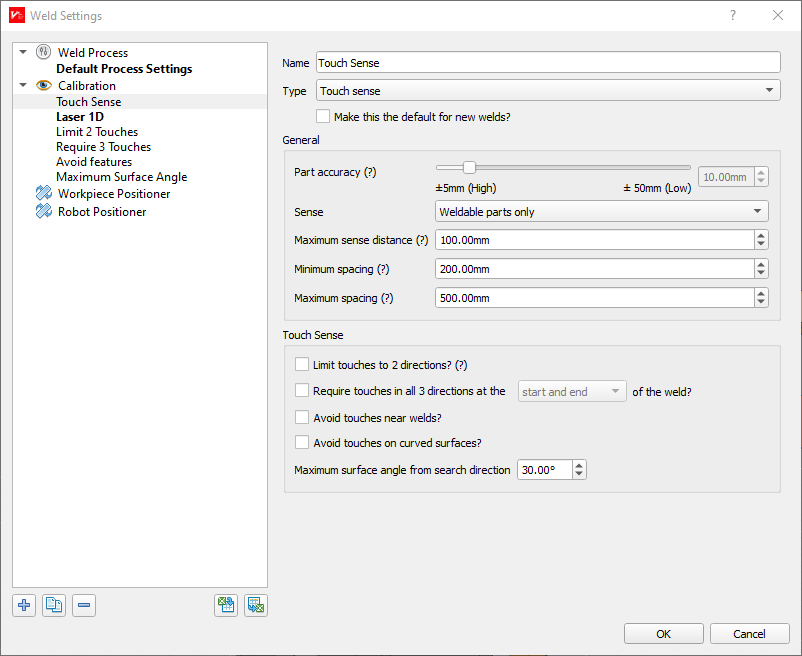
General Calibration Settings
To start, you’ll see a section labelled “general”. This section of settings is common across all types of calibration, of which its options include:
Specifying the accuracy of your parts measurements.
Select the type of surfaces able to be sensed.
Specify the spacing and sense distance.
In addition to these general options, there are also 3 types of calibration available to select. These being touch sense, 1D laser sense, and 2D laser sense (also known as profile sense). Each of these have unique options you can adjust, however touch sense and 1D laser sense do have a few common options:
Touch Sense and 1D Laser Sense Common Options
Limiting senses in 2 direction
Requiring sensing in 3 directions
Avoid sensing near welds
Avoid sensing near curved surfaces
Setting a maximum surface angle from search direction
1D Laser Sense Unique Options
Avoid reflections which may cause invalid sensor readings
Set a minimum incidence angle
Note
Due to the complexity of 2D laser sense, its options will be covered entirely in its own tutorial.
Step 3 - Workpiece Positioner Settings
The next set of settings we’ll look at are the “workpiece positioner settings”. This type of weld setting lets us specify how the workpiece positioner is to move during welding. Once again, let’s select the workpiece positioner type and select the plus button.
The workpiece positioner options consist of:
Disabling workpiece positioner movement during welding
Locking the positioner to a specific location
Limiting the positioner to only valid positions within a specified range
Limiting the positioner to any position within a specified range
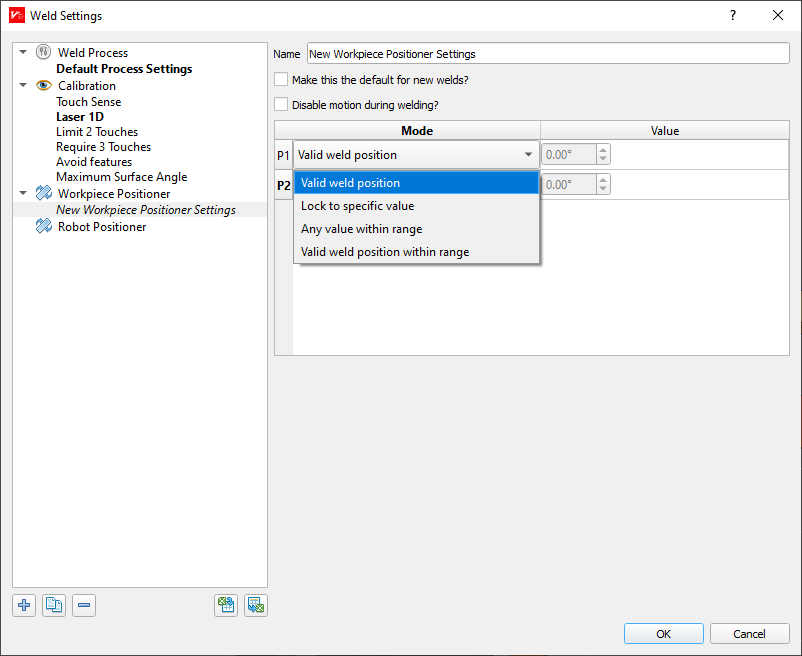
Workpiece Positioner Settings
These modes all directly affect the movement of the positioner.
Step 4 - Robot Positioner Settings
The 4th and final section of the weld settings looks at the options regarding the robot positioner. In weld settings, select the robot positioner setting type, then one again click the plus button to create a robot positioner setting. These settings directly control how the robot positioner moves during welding. Similar to the workpiece positioner settings, once again we have 4 modes of movement we can specify for the positioner. However, an additional option we have is to limit movement to only one side of the weld. These options being:
Allow movement
Do not move
Lock to a specific value
Lock relative to current weld motion
Limit to only be positioned on the positive/negative side of the weld
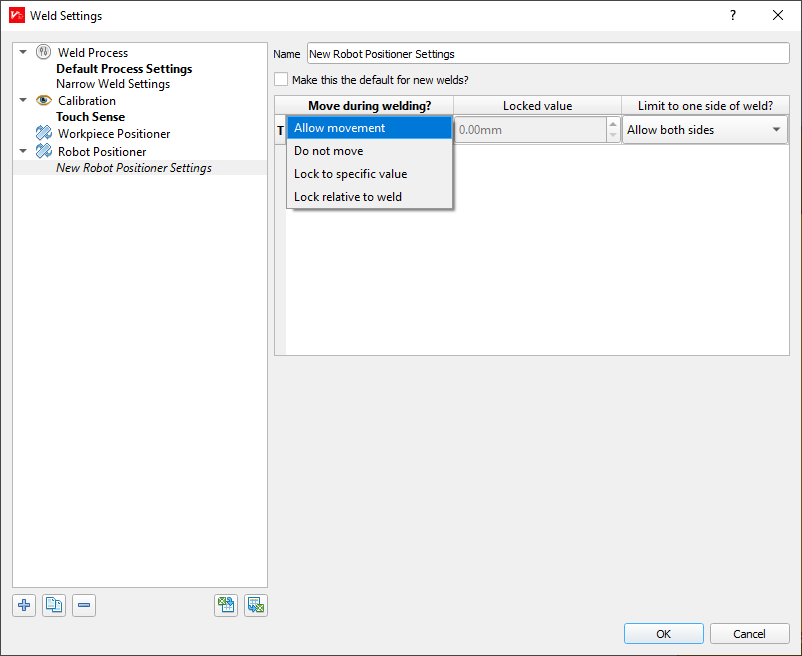
Robot Positioner Settings
These options can also be used to have a unique effect on gantry cells, however this will be covered in detail in the robot positioner tutorial.