16. Robot Positioner Settings
Tutorial
This tutorial covers the robot positioner settings you can alter in Verbotics Weld.
Prerequisites and Resources
This tutorial will cover a deeper look at the robot positioner settings you can configure in Verbotics Weld. These were looked at briefly in the Weld Settings Overview tutorial. If you haven’t completed that tutorial, it’s recommended that you visit that first to get a general understanding of all the various options in weld settings.
Before starting with the tutorial, ensure to have the Yaskawa Motoman example cell downloaded and imported into Verbotics Weld. This cell is available to download from the examples page on our website.
This walkthrough also uses the robot positioner example project 1. and the robot positioner example project 2 which should also be downloaded using these links.
Video Tutorial
Step by Step Guide
Robot Positioner Options
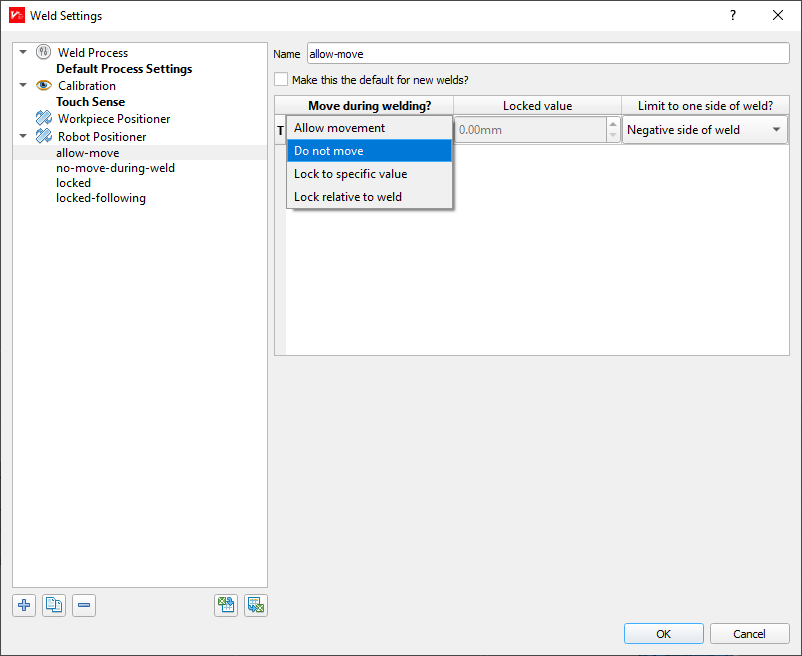
Once loaded into the example project, open the weld settings window and navigate to the Robot Positioner Settings. For this example project, we’ve created 4 robot positioner settings each representing a different robot configuration set, and applied each one to a respective weld. The 4 configurations available to select are:
Allow MovementDo Not MoveLock to Specific ValueLock Relative to Weld
Robot Positioner Options
Allow Movement
The allow movement configuration allows the positioner to move and position itself without limits during and outside of welding operations. Go ahead and return to the viewer and select the “free-movement weld”. Notice that this weld has the allow move setting applied. Now, using the weld path troubleshooter, adjust the robot positioner slider. You’ll notice it moves freely along the track without any issues.
Do Not Move
This next configuration option restricts the positioner to be unable to move during the welding motions. Locate and select the “no-move-weld” from the welds widget, then once again adjust the robot positioner slider in the weld path troubleshooter. Notice you can freely move the positioner, however now locate the weld motion generated for the same weld in the program tab. Simulating this weld shows the positioner is forced to remain in the same position during the weld motion.
Lock to Specific Weld
The third configuration allows you to select a specific position along the track to lock the positioner to. For the example weld, labelled “locked”, using this configuration, we’ve locked the positioner to 0, so let’s go back to the viewer and select the locked weld to see this in effect.
If you try to move the positioner, it refuses to change position, and if you shift to the program tab and watch the weld planned for it, it completes the entire weld from a stationary position.
Lock Relative to Weld
This final configuration allows for you to force the positioner to always stay in line with the weld currently being completed. Locate the program for the “locked-follow-weld” and simulate the weld motion generated. You should see that as the robot welds the outside of the cylinder the gantry moves in-time to ensure it remains perfectly inline with the weld itself.
Additional Robot Positioner Options
While those are the 4 main configurations, there’s also one additional option able to be enabled called Limit to one side of weld. If we return to our weld settings and look at “Allow Movement”. At the right hand side of the table, there is a 3rd option currently set to Allow both sides. Using this option, we can specify whether to limit the positioner to only move relative to the positive side of weld or negative side of weld.
If you return to the viewer, notice that the robot positioner value is shown as positive when positioned on one side of part, or more specifically the current weld selected, but when shifted across to the other side it becomes negative.
Using this option, we can restrict to the positioner to only one of these 2 sides.

Restricting the Positioner to a Side
Applying Robot Configurations to a Gantry
In addition to the uses described above for a single axis positioner, these configurations can be used to restrict the different axial movement of a gantry positioner.
Gantry Robot Positioner
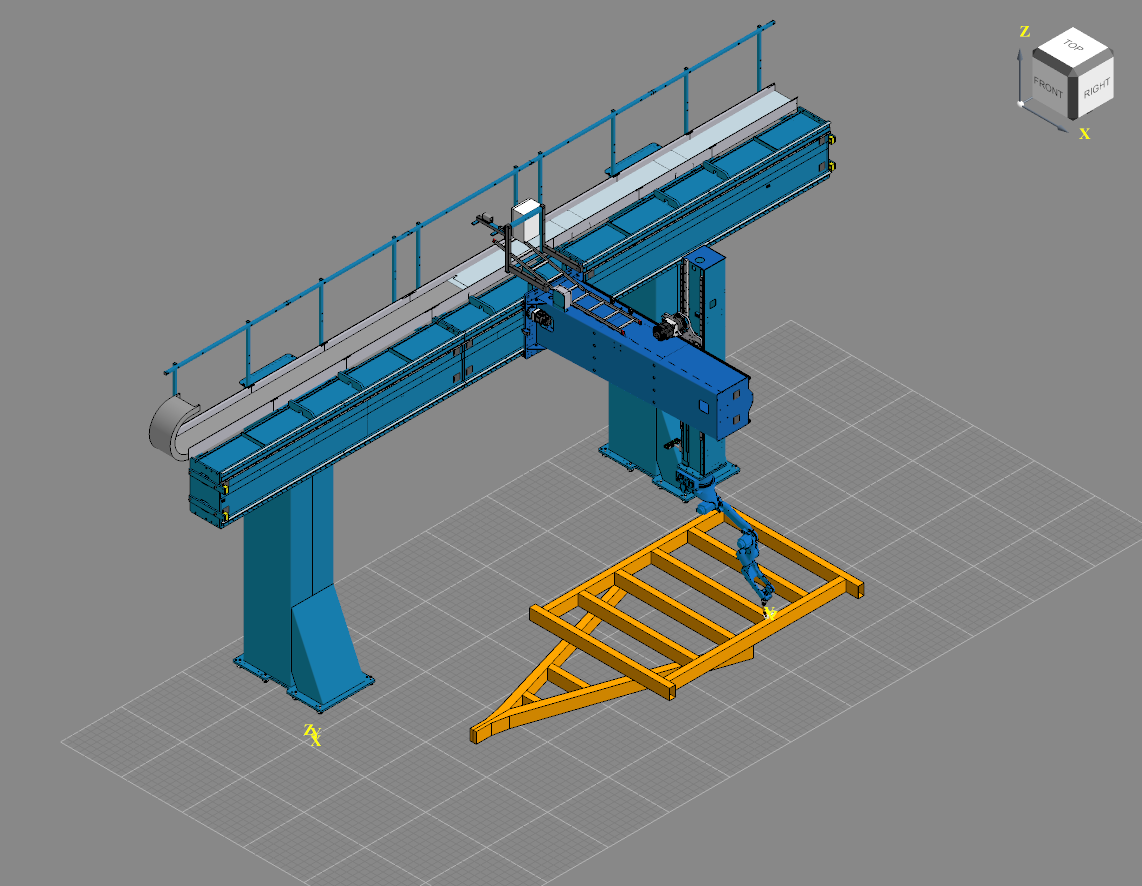
Load Robot Positioner Example Project 2 into verbotics, which now looks at welding a simple trailer using a gantry positioner and with a mounted yaskawa motoman.
Select the example weld available and apply the “lock axis Y” robot-positioner setting. When using a Do Not Move configuration with a gantry, we can limit which axis are able to move. For this example the y axis is locked, however locking the other positioners would allow us to lock the gantry in the x and z axis as well. Swap the robot positioner settings to “Lock Axis X” or “Lock Axis Z” to see this in effect.