14. Calibration - 1D Laser Sense
Tutorial
This tutorial covers the various settings and options able to be adjusted when using 1D laser sense calibration.
Prerequisites and Resources
This tutorial will cover a deeper look at the 1D laser sense calibration type we looked at briefly in the Calibration Setting’s Overview tutorial. If you haven’t completed that tutorial, it’s recommended that you visit that first to get a general understanding of all the various options in the calibration settings.
Before starting with the tutorial, ensure to have the KUKA KR8 example cell downloaded and imported into Verbotics Weld. This cell is available to download here.
This walkthrough also uses the laser sense example project which can be downloaded here.
Video Tutorial
Step by Step Guide
Step 1 - Specifying Number of Senses
To start, navigate to weld settings and select the calibration settings labelled Laser 1D. Underneath the general calibration settings, you’ll find the 6 1D laser sense options.

Laser Sense Options
Let’s look at the first 2 options, limit sensing in 2 directions and require sensing in all 3 directions. When we create a welding program, there may be times when we need to calibrate only in the 2 directions perpendicular to the weld, and times were a 3rd touch is required to calibrate along the weld axis.
In addition to enabling the 3 sense requirement, we can also specify the locations along the weld where these 3 senses are to occur. Note, that depending on your part geometry, this may or may not be possible for your own projects. There are 4 options we have regarding the 3 sense locations, these being:
3 senses at both the
start and endof every applicable weld3 senses at the
start or end onlyof every applicable weldOr explicitly 3 touches the
start onlyof every applicable weldOr explicitly at the
end onlyof every applicable weld.
Step 2 - Avoiding Features During Sensing
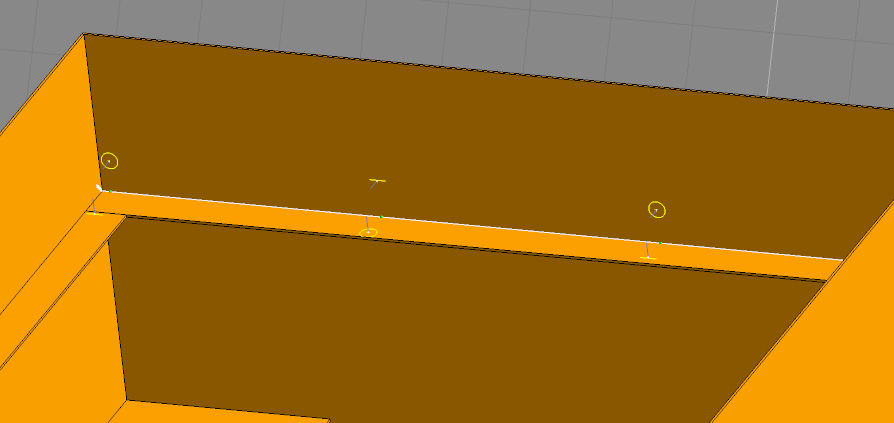
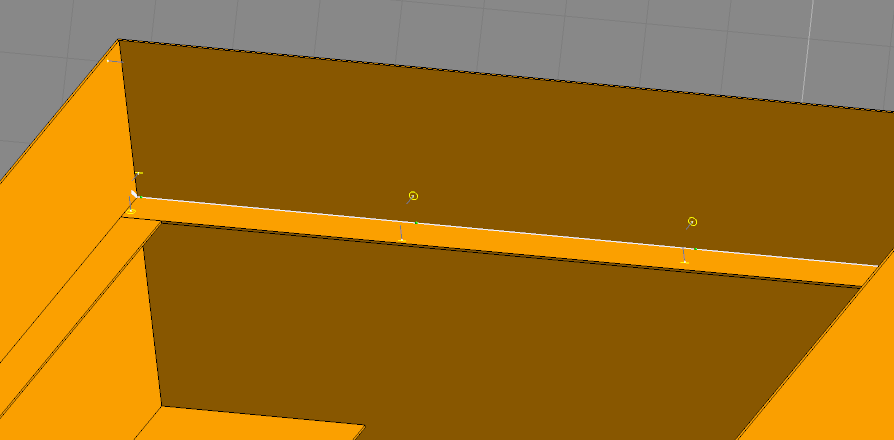
The next 2 options, avoid sensing near welds and avoid sensing on curved surfaces, both allow for reducing sensing inaccuracies by ensuring the planner avoids sensing in these problematic areas.
Below is an example of this:
Default Sensing |
Avoiding Features |
|---|---|
|
|


In addition to these 2, 1D Laser Sense also has a 3rd item it can be set to avoid. The avoid reflections option is used to reduce invalid sensor readings, this time by ignoring values surrounding instances where reflection could have occurred.
Step 3 - Limiting Sensing Angles
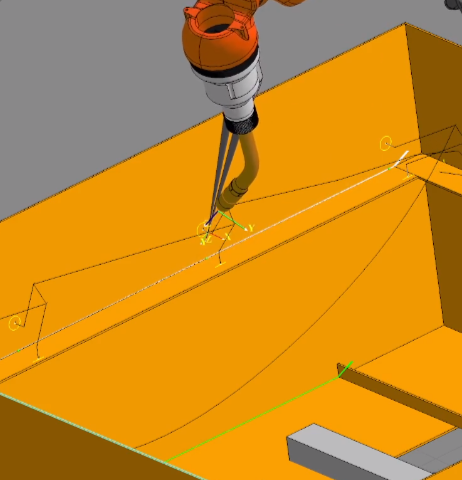
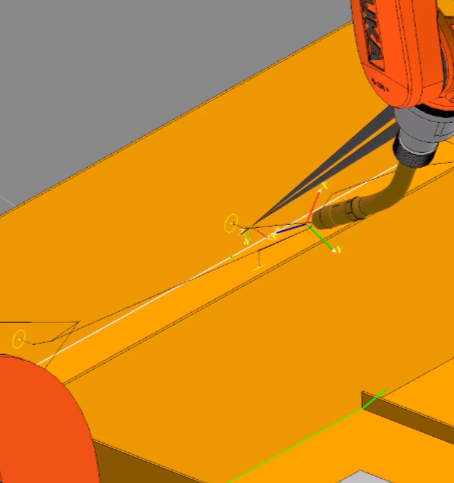
The next option we’ll look at is limit incidence angle. Using this, we can limit the minimum angle we want sensing to occur at. Looking at the examples shown below, you’ll notice the torch’s work angle shifting as the minimum incidence angle increases.
Limit Incidence Angle |
Example |
0° |
|
45° |
|
60° |
|
The last option we’ll be covering today is the Maximum surface angle from search detection option. Using this, we can specify a limit for the relative angle of surfaces to be sensed.
In the example project, we have this set to 0° which causes the sensing motion to approach exactly perpendicular to the sensing location. However, increasing this would allow sensing motions to approach sensing directions at an angle within the maximum limit set.