12. Calibration - Overview
Tutorial
This tutorial will look at an overview of the general calibration settings and the different path finding options available to use across all calibration methods.
Prerequisites and Resources
Before starting with the tutorial, ensure to have the KUKA KR8 example cell downloaded and imported into Verbotics Weld. This cell is available to download here.
This walkthrough also uses the calibration overview example project which can be downloaded here.
Step by Step Guide
General Calibration Settings
Once loaded into the example project, navigate to the weld settings and create a new calibration setting. You can do this by selecting calibration on the left, then clicking the plus icon on the bottom of the settings window which represents the create button.
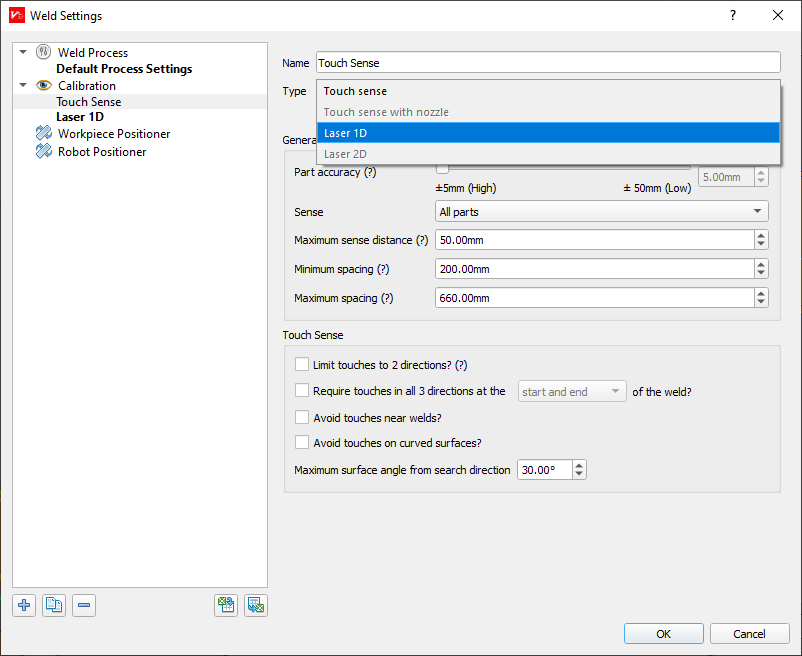
When creating a new calibration setting, there a 3 types of path finding we can choose between, as well as 5 general options which are persistent across each of the sense types. These 3 types include:
Touch SenseLaser 1DLaser 2D(Profile Sense)
Each of these will be covered in greater detail in their own tutorial videos, so for now select touch sense and we’ll move onto the general options.
Calibration Settings
These 5 options are consistent regardless of the path finding type chosen:
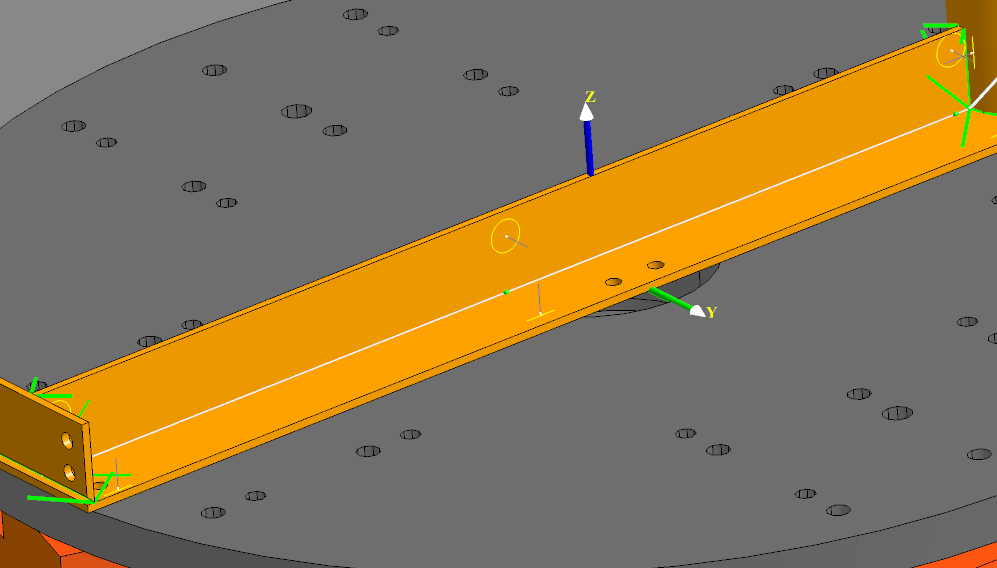
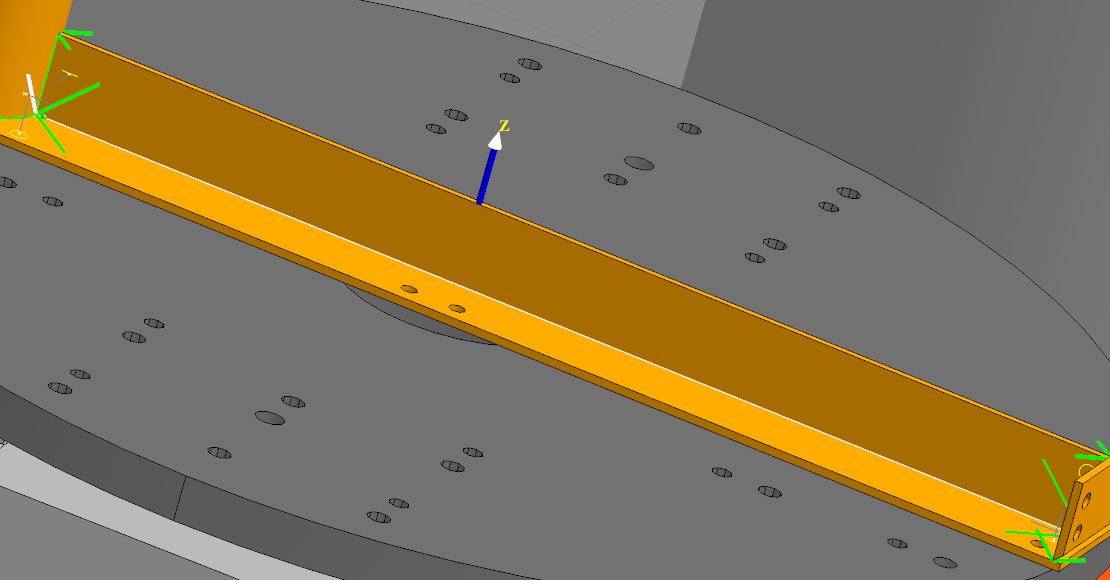
Part Accuracy- The part accuracy option consists of a slider which allows for specification of the maximum difference between the CAD model and the real-world part. For our example today, we know the part is accurate to within+-5mm, so set the slider there.Sense- Sense allows us to select what parts are to be sensed. For this example, we don’t want to limit the senses to weldable parts only, so lets go ahead and selectall partsfrom the drop down box.Maximum Sense Direction- Limits how far away a sense can occur from the location being calibrated. For this example, if we set this to only50mmyou’ll notice sensing motions will always sense within 50mm of the current weld location.Minimum Spacing- Specifies the minimum length of spacing in-between points to be sensed. For this example, set this to200mm.Maximum Spacing- Specifies the maximum length of spacing in-between points to be sensed. With theminimum spacingset to200mm, if we go ahead and set this to660mmthen you should find the calibration now only conducts 2 sets of sensing points instead of 3. (See below)
Default Settings |
New Calibration Setting |
|---|---|
|
|