Weld Settings
You can edit weld settings by clicking on the “Weld Settings” in the ribbon, or next to the “Settings” in the detail area for a weld. There are four types of weld settings:
Process Settings which control the torch geometry, welding schedule, weld position and other process-related inforamtion.
Calibration Settings which manage how calibration is performed.
Robot Positioner Settings which control the movement of the robot’s positioner (e.g. track or gantry).
Workpiece Positioner which control the movement of the workpiece positioner (e.g. rotator).
To create, copy and remove settings, click on the appropriate setting type and click the “plus”, “copy”, or “remove” icon below the settings list in the bottom left of the dialog.
Tip
Settings can be imported and exported from a CSV spreadsheet in order to share them more easily between projects.

Note
You can apply settings to one or more welds by using the Weld Detail area, or by right clicking on the welds to open the Weld Context Menu and selecting the settings.
Process Settings
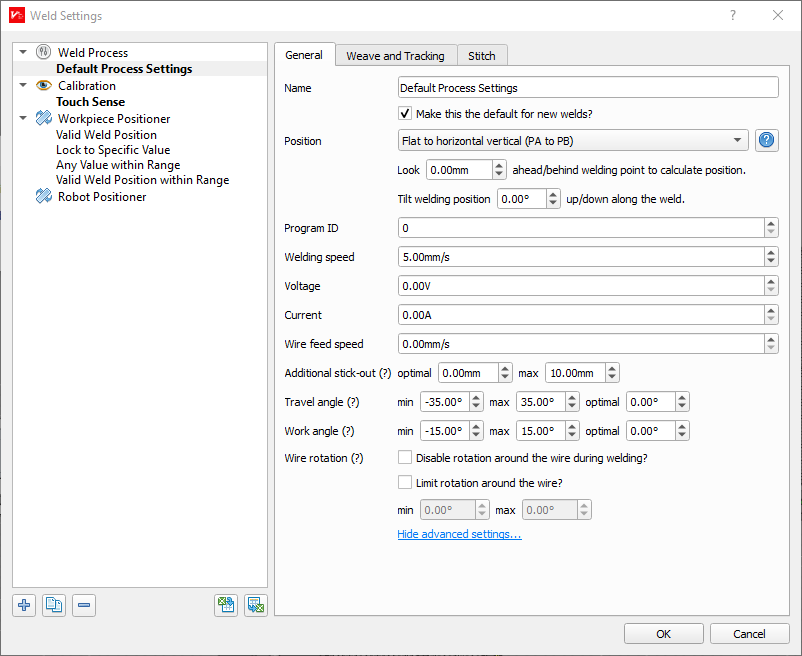
By default, only a subset of the weld process settings are shown. To show all settings, click the “Show advanced settings…” text.
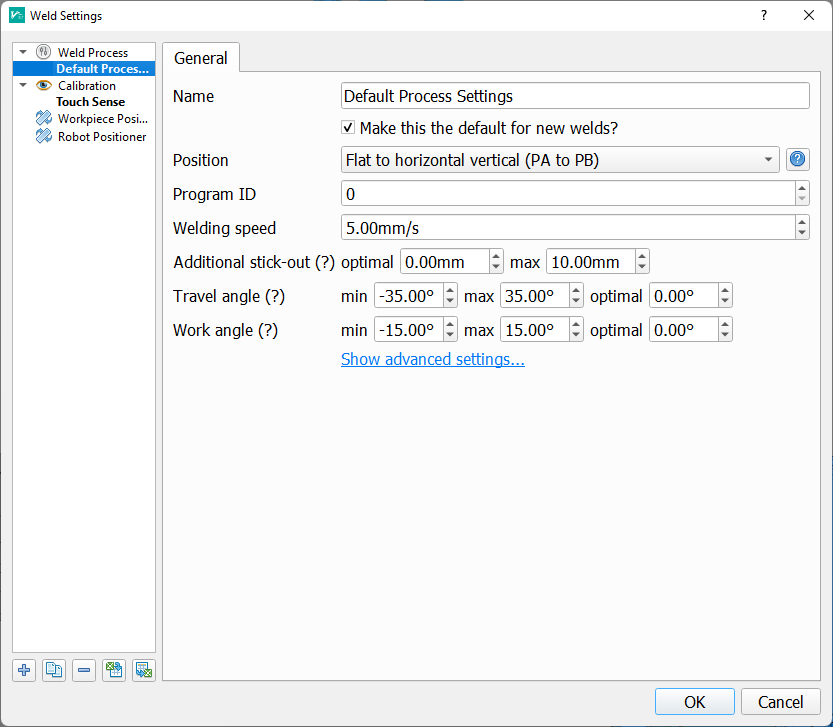
Name: The name of the weld setting.
Position: The position to perform the weld (e.g. downhand, vertical up). A workpiece positioner is required to orient the weld in the selected welding position. If there is no workpiece positioner, this setting will be hidden. See the Weld Position section for a description and diagram of each possible value. You can use the “Look Xmm behind/ahead” the weld setting to offset the position along the weld which is used to calculate the welding position. You can use the “Tilt welding position” setting to add a custom offset to the calculated welding position.
Program ID: Sets the welding program in the
welddatafor ABB robots, or program number for UR or KUKA robots.Arc Start: For all other robots this is the text that will be placed in the arc start command. For Yaskawa Motoman robots ‘13’ will create the arc on instruction
ARCON ASF#(13). For Fanuc ‘1, 1’ will add the arc on instructionArc Start[1, 1]to the end of movement at the start of the weld. You can also enter custom text here which will replace the ARCON or Arc Start command.Arc End: For non-ABB robots. The text that will be placed in the arc end command. For Yaskawa ‘13’ will create the arc on instruction
ARCON AEF#(13). For Fanuc ‘1, 1’ will add the arc on instructionArc End[1, 1]to the end of movement at the end of the weld.Welding Speed: Sets the speed for welding.
Voltage: Only used in ABB robots to set the voltage in the output
seamdata.Current: Only used in ABB robots to set the current in the output
seamdata.Wire feed speed: Only used in ABB robots to set the wire feed speed in the output
seamdata.Additional stick-out: Amount of stick-out to use over the set TCP position.
Travel angle: The minimum, maximum, and optimum travel angle to use when planning welds. This is the equivalent to the push/drag angle. Negative values indicate a drag. The optimum value will be used as the ideal travel angle where possible. The minimum and maximum set the limit of the travel angle.
Work angle: The minimum, maximum, and optimum tilt angle to use when planning welds. A value of zero will bisect the two faces that formed the identified welds. The optimum value will be used as the ideal tilt angle where possible. The minimum and maximum set the limit of the tilt angle.
Wire Rotation: The minimum and maximum values of the wire rotation (angle between the welding torch travel direction and the weld direction). An angle of zero would always align the torch travel direction with the weld direction. By default, this is unconstrained.
Weave
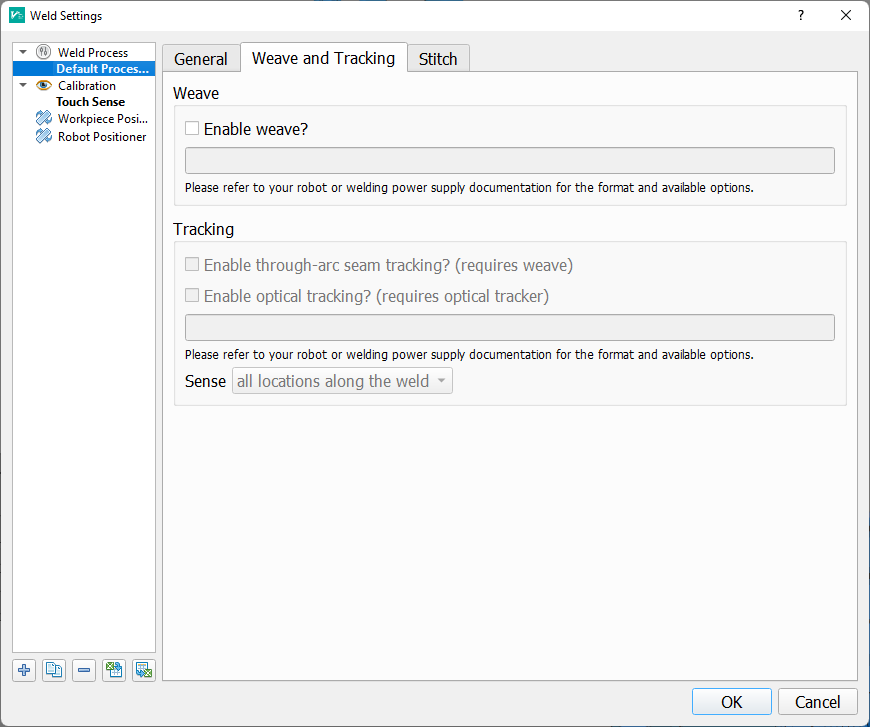
Enable weave? will output the instructions to make the robot weave during welding if enabled. The textbox should be used to add in the weaving parameters to be sent to the robot.
For ABB this will be the
weavedatafor example[1,0,3,3,0,0.2,0,0.2,0,0,0,0,0,0,0]. For Yaskawa this will be the weaving file number e.g.3.Enable through-arc seam tracking will output the instructions to make the robot use seam tracking during welding. The textbox should be used to add in the weaving parameters to be sent to the robot. You can also select “Enable Optical Tracking” if this is available for your workcell.
For ABB this will be the
trackdatafor example[0,FALSE,10,[0,20,20,0,0,2,10,20,2],[0,0,0,0,0,0,0]]. For Yaskawa this will be the Comarc settings for exampleU/D=260 L/R=5.0.Sense allows you to limit calibration so it is only performed at the start and/or end of a weld path. This allows you to tell Verbotics to only calibrate the start position, and then use seam tracking during the weld path.
Stitch
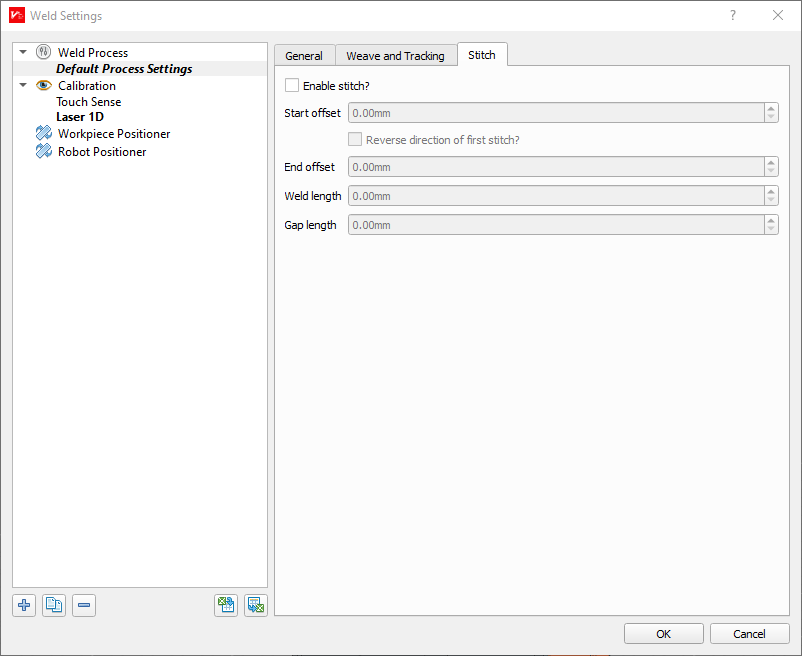
Enable stitch? Will create a weld with stitch pattern.
Start offset: The distance from the start of the weld to begin the first stitch.
Reverse direction of first stitch? Reverses the direction of the first stitch if enabled. Useful to reduce the amount of drag travel angle require to move from an inside corner.
End offset: The distance from the end of the weld to end of the last stitch.
Weld length: The length of each stitch segment.
Gap length: The target length of each gap segment. The gap will be adjusted for each weld such that the stitches have the full segment length depending on the overall length of the weld.
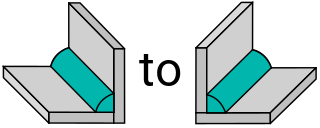
Weld Position
The Position value controls how the workpiece positioner is controlled relative to the weld. The possible values are shown below. Verbotics Weld will attempt to meet the desired weld position where possible within the ability of your workpiece positioner.
Value |
Diagram |
Description |
ISO 6947 |
|---|---|---|---|
Flat to horizontal vertical |
|
Allows the weld position to transition freely between flat and horizontal vertical positions as required. The extents are based of the weld’s groove angle. This is the default value. |
PA to PB |
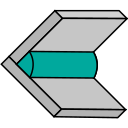
Flat |
|
Maintains the weld at the ideal flat / downhand position. |
PA |
Horizontal vertical |
|
Maintains the weld at the ideal horizontal vertical position. |
PB |
Horizontal |
|
Maintains the weld at the ideal horizontal position. |
PC |
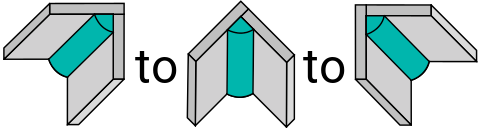
Overhead to horizontal overhead |
|
Allows the weld position to transition between the ideal overhead position and overhead horizontal position. Similarly to the “flat / horizontal vertical” setting, this is based on the weld’s groove angle. |
PD to PE |
Vertical Up |
|
Maintains the weld in the ideal vertical up position. |
PF |
Vertical Down |
|
Maintains the weld in the ideal vertical down position. |
PG |




Calibration Settings
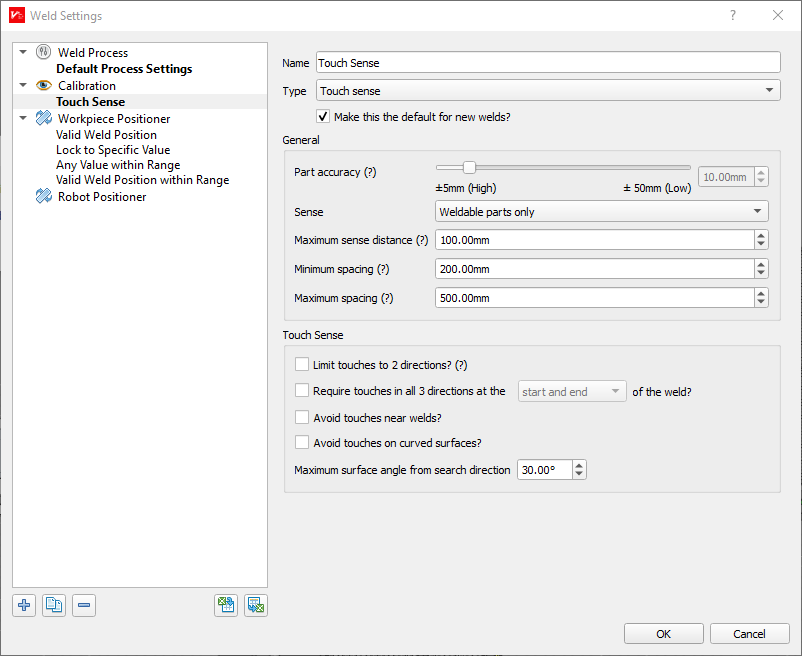
Name: The name of the calibration setting.
Type: The type of calibration used. Available options will depend on your workcell.
Touch Sense: Use touch sense calibration
Laser 1D: Use 1D laser touch sense
Laser 2D: Use 2D laser touch sense
Make this the default for new welds? Configure new welds to automatically use these calibration settings by default
General
Part Accuracy: Sets the value to be used for the part accuracy (i.e. the maximum difference between the CAD model and real-world part). This setting changes the size of the uncertainty window when performing sensing. The calibration planner will take this into account for search actions.
Sense:
Weldable parts only Only senses parts that are enabled for welding. This can be useful for selectively preventing searching on certain parts.
Weld faces only Only touch senses on faces that are adjacent to welds. Note that this will not effect the sensing action that is in the weld direction.
Weld parts only Only senses on parts that are being welded.
All parts Senses along all parts in workpiece.
Maximum Sense Distance: Sets the maximum distance where a sense action will be used when planning. For example, if this is set to 50mm, The maximum distance that a sense can take place from the calibration location is 50mm.
Minimum Spacing The minimum distance between two sense operations when touch sensing long straight paths.
Maximum Spacing: The maximum distance between two sense operations when touch sensing long straight paths. This allows better touch sense coverage for long welds, where calibration values are more likely to differ along the weld.
Touch Sense
Limit touches to 2 directions will only sense in the directions perpendicular to the weld path.
Require touches in all 3 directions: An optional parameter to require a sensing action in the weld direction, This will improve the accuracy of the start / stop position of the weld but may not be possible depending on the geometry being welded. At the;
start and end: Require 3 direction touch sense at both the start and the end of the weld.
start or end only: Required a 3 direction touch sense at either the start or the end of the weld.
start only: Require 3 directions of touches only at the start of the weld.
end only: Require 3 directions of touches only at the end of the weld.
Avoid touches near welds? Controls whether the planner will avoid sensing locations where welds are in the project.
Avoid touches on curved surfaces? Curved surfaces may be prone to higher variability compared to flat surfaces. Use this option to avoid touch sensing curved surfaces.
Maximum surface angle from search direction will limit the relative angle of surfaces to be touch sensed.
Laser 1D
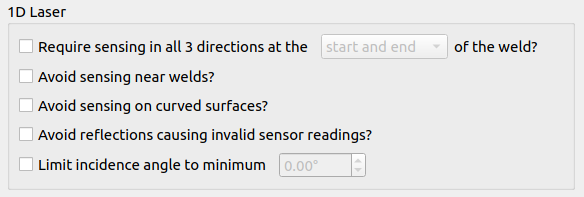
Laser 1D has two settings that are not shared with Touch Sense calibration:
Avoid reflections causing invalid sensor readings? When laser sensing, invalid sensor readings can occur is some situations due to reflection. This setting ignores these false positives by rejecting values surrounding those where a reflection could have occurred.
Limit incidence angle to minimum Limit the angle between the surface being sensed and the laser to be above the specified angle.
Workpiece positioner
Configure the behaviour of the workpiece positioner.
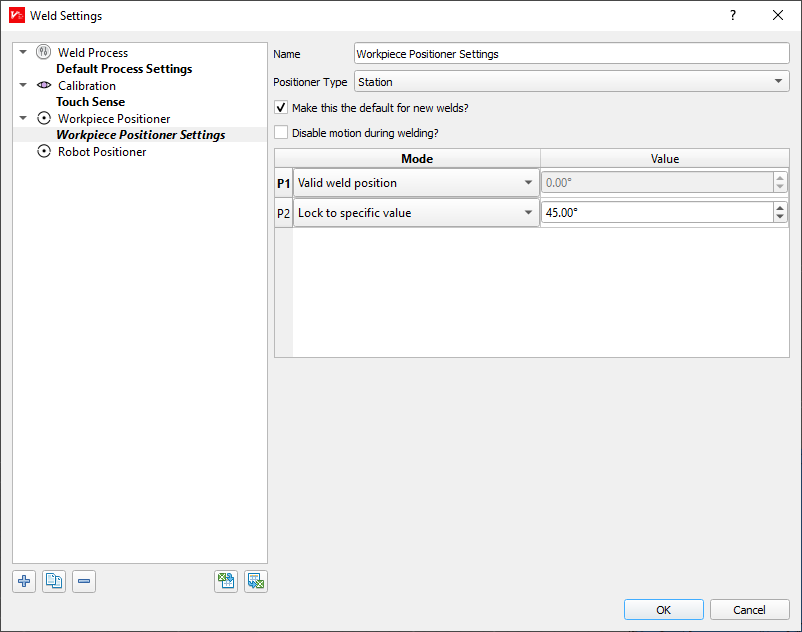
Make this the default for new welds? Configure new welds to automatically use these robot positioner settings
Disable motion during welding? Allow the positioner to move within parameters between welds and lock position during welding.
Configurable settings in the table influence the workpiece positioner axis with the mode indicated in the first column. The configurable settings for each positioner axis are:
Valid weld position is the default setting, allowing all valid positions.
Lock to specific value locks the positioner to a set value during welding and positioning.
Any value within range defines a range for the positioner to operate within.
Valid weld position within range defines a range for the positioner to operate within accounting for valid weld conditions.
Due to the way the Verbotics solver operates, some workpiece configurations will produce an invalid result. The table below outlines valid and invalid configurations where J1 and J2 represent joint 1 and joint 2 respectively.
J1 - Valid weld position |
J1 - Lock to specific value |
J1 - Any value within range |
J1 - Valid weld position within range |
|
J2 - Valid weld position |
Valid |
Valid |
Invalid |
Valid |
J2 - Lock to specific value |
Valid |
Valid |
Valid |
Valid |
J2 - Any value within range |
Invalid |
Valid |
Valid |
Invalid |
J2 - Valid weld position within range |
Valid |
Valid |
Invalid |
Valid |
Laser 2D
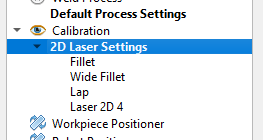
Each 2D laser setting needs a library of profile types associated with it, corresponding to the profile types (also known as tasks) configured in your sensor’s control system. To create a profile type, click on the 2D laser setting item in the list on the left, and then click the  button.
button.
This will create a new entry under your laser 2D setting as shown below.
To edit the parameters for an individual profile type, click on it in the tree. The fields in the top half of the page relate to the entire 2D laser setting, and the lower half relates to the joint type you have selected.
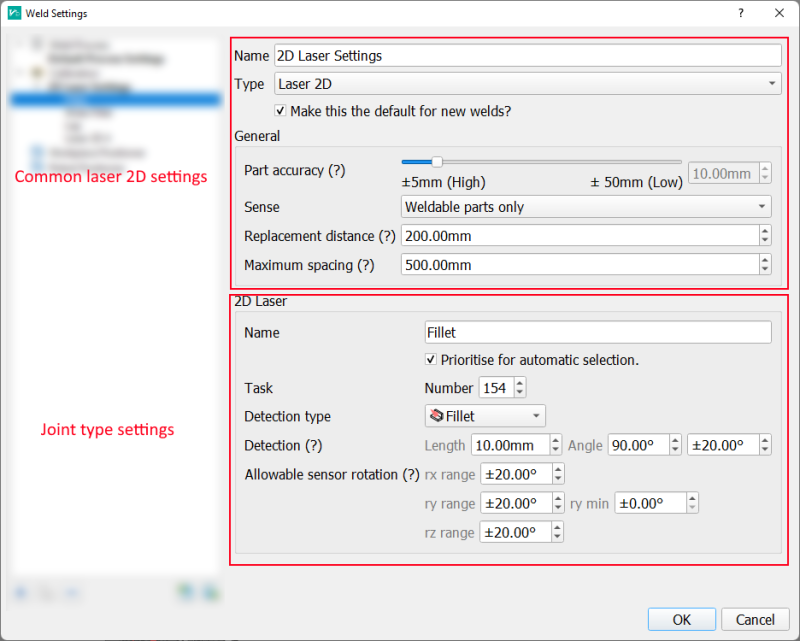
Laser 2D sense and profile type settings.
You can also click on parent entry of the laser setting to edit the “Default” settings. These options will be applied to all profile types which are associated with the setting.
Editing the default profile type settings.
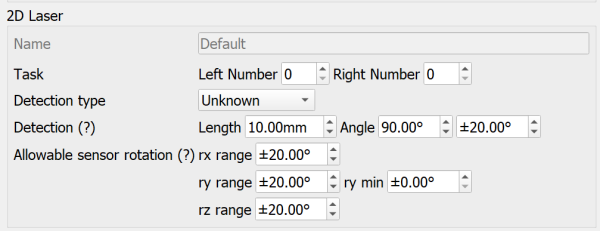
The settings in the “General” area are common with the other calibration types. The settings in the “2D Laser” area are for each profile type, and have the following behaviour:
Name the name for selection and display in Verbotics Weld.
Prioritise for automatic selection if two profile types are considered viable for use, checking this will prioritise it.
Task must correspond to the task number which is configured in your sensor control system. Depending on the detection type, this will either have only “number”, or “left number” and “right number”. Left and right number are for features such as edges which will be detected differently depending on the orientation of the sensor.
Detection type controls the type of joint geometry which the profile type corresponds do. Changing this will change the available fields. Verbotics will automatically analyse your part to determine the appropriate profile type using this. “Override” is a special detection type which will not perform part recognition if you wish to manually use this in the 2D calibration editor.
Detection length is the minimum length of a straight profile edge which is used for detection. Detection angle is the angle and range of feature you are looking for - for example the opening angle of a Fillet feature.
Allowable sensor rotation is the maximum allowed rotation around each sensor axis from the ideal viewing position. Ry min allows you to avoid looking directly at the feature to avoid reflection issues if required.
Robot Positioner
Configure the behaviour of the robot positioner.
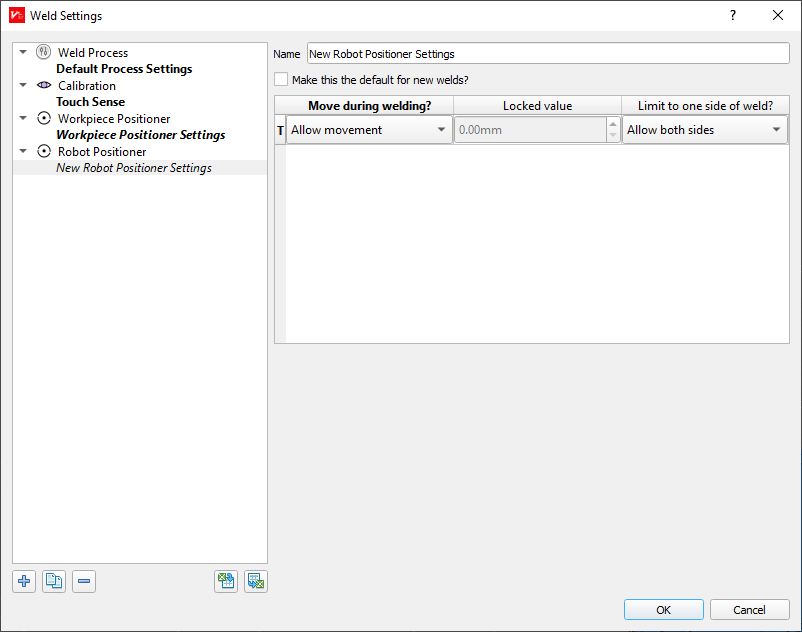
Make this the default for new welds? Configure new welds to automatically use these robot positioner settings
Configurable settings in the table influence the workpiece positioner axis with the name indicated in the first column. The configurable settings for each positioner axis are;
Move during welding? How the axis moves during welding
Allow movement allows the positioner axis to move freely within its limits
Do not move stops the positioner axis from moving during the weld
Lock to a specific value locks the axis to a specific value during the weld.
Lock relative to weld locks the positioner axis to value relative to the weld. There may be movement of the axis during the weld depending on the alignement bewteen the axis and the weld path. Configurable for Lock to specific value and Lock relative to weld. Sets the absolute or the relative to weld position of the locked value respectively.
Limit to one side of weld? Limit the selected positioner axis to only the positive or negative position relative to the weld. Can be useful for standardising the robot pose for a group of welds.