Weld Path Troubleshooter
The Weld Path troubleshooter is a tool available to help with the diagnosis of planning errors. Using the provided fields, toolpath configurations can be tested for validity. This can help by identifying weld setting problems or assisting with tool reach or access issues.
Note
The Weld Path widget is not visible by default. To access the tool, go to View > Docks and Toolbars > Weld Path, then access it using the tab underneath the Robot widget.
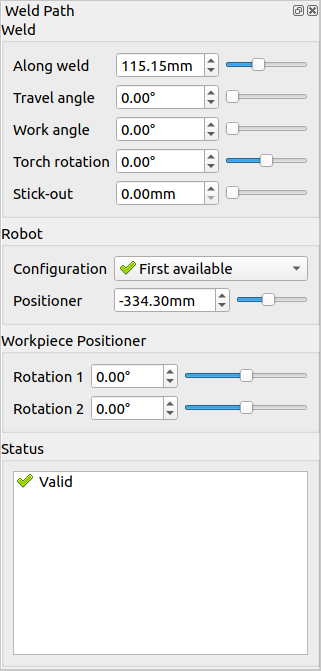
Weld
Along Weld: The position in mm along the weld path to test the TCP.
Travel Angle: The travel angle used to position the torch. This will be limited based on the weld settings set.
Work Angle: The work angle used to position the torch. This will be limited based on the weld settings set.
Torch Rotation: The rotation of the torch around the welding wire.
Stick-out: The stick-out used to position the torch. This will be limited based on the weld settings set.
Robot
Configuration: The robot configuration to be used to solve the robot pose. For typical robot manipulators this will be a value from 1-8. In Verbotics Weld the typical configuration will be 3 or 4.
Positioner: The offset of each axis of the robot positioner relative to the weld.
Workpiece Positioner
Rotation 1: The angle used to position the workpiece if possible. Rotation 1 is the angle around the welding travel direction. A value of 0 will attempt to position the workpiece such that the nominal welding wire direction is aligned down with gravity.
Rotation 2: The angle used to position the workpiece if possible. Rotation 2 is the angle around the nominal welding wire direction. For single axis positioners this value will typically have no effect. For 2-axis positioners this may be used to flip the workpiece between the two solutions provided, or in a specific case, allow rotation of the workpice.
Status
This table indicates whether the currently selected parameters result in a valid state. Any errors with state are indicated.
Potential status readouts
In the status table, there are a number of potential readouts that indicate the reason a planning error may occur in the configured weld path configuration.
“Could not solve kinematics” The kinematics could not be solved. This means the manipulator was unable to reach the tool in the selected configuration and parameters. Tweak the parameters until a solution can be reached.
“Collision Detected” A collision has been detected in the current configuration. In the viewport, collisions are highlighted with a red outline. These can be avoided by moving colliding parts or tweaking the weld path parameters.
“Tool is Colliding” Indicates that some part of the tool (which may have been moved off the manipulator) is in collision. The collision could be with a part, or another link present in the Work Cell. In general, modifying the Travel angle, Work Angle and Torch Rotation remedies this.
“Nozzle is Colliding” Indicates that the nozzle is in collision. This means that the wire may be intersecting with a part on the underside of the weld. This can generally be remedied by increasing the Stick out parameter.
Note
Verbotics Weld will expand the nozzle and tool a slight amount depending on the settings for your workcell. This may cause a tool or nozzle collision indication when it is not apparent in the viewer. Please contact us if you would like to know the expansion values used for the workcell model you are using.