Project Settings
The Project Settings dialog can be accessed from File > Project Settings... and allows project-specific properties to be tweaked in addition to parameters related to Program Generation.
General
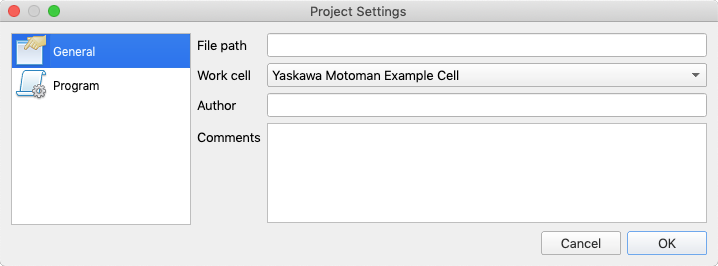
File path: Path to where the current project is saved.
Work cell: Changes which work cell to use. This is useful if a single part will be used across mutiple work cells (for example, a robotic system with multiple stations for part loading). If the work cell is changed, all weld plans are cleared.
Author: Text field to add information about the author of the project.
Comments: Text field to add comments about the project.
Program
This section controls how the individual welding operations are assembled into a complete program.
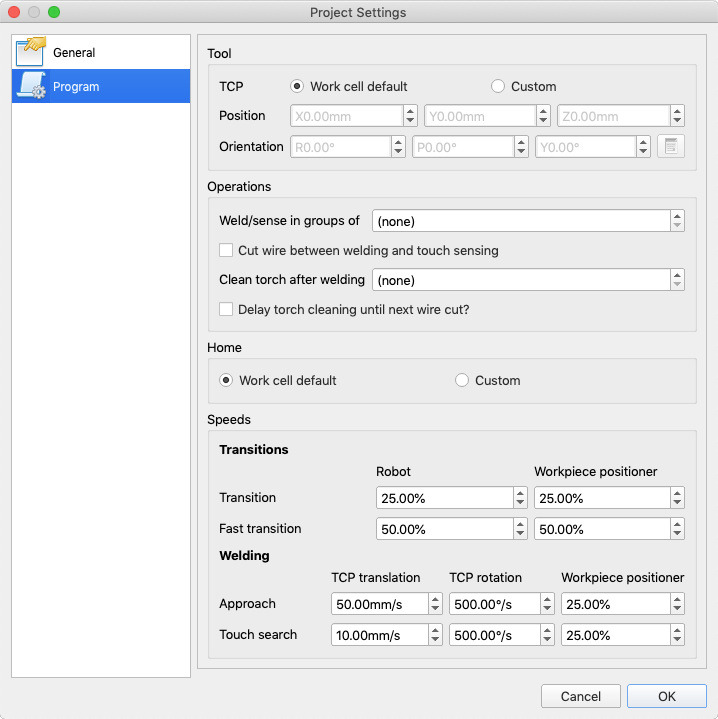
Tool
TCP: Selects if the default TCP for the work cell or a customised TCP should be used. This is useful if the TCP is modified after the work cell is created (e.g. the torch gets bumped and is moved slightly). If the TCP is changed significantly, a new work cell model should be obtained.
Operations
Weld/sense in groups of: Sets how many weld/sense operations should be grouped together. Setting this to five for example, will output a program where the sensing actions for five welds are performed consecutively before the weld actions for those five welds are performed. This minimises the number of wire cuts that are required, however increases the chance of a poor touch sense if the wire is bent, damaged, or moved.
Cut between welding and touch sensing: Calls the wire cut routine between welding and touch sensing if enabled. Will also add a motion to home prior to the wire cut.
Clean torch after welding: Sets the total length to weld before calling the torch cleaning routine.
Delay torch cleaning until next wire cut: If this is enabled, torch cleaning will be delayed until immediately after a wire cut.
Home
Selects if the default home position for the work cell or a customised home position should be used.
Speed
Sets the speeds to output for each type of motion with the output program.