Planning
Verbotics Weld automatically generates the robot motions required to create welds for manufacturing.
Planning is performed with the following steps:
Setup and configure your Verbotics Weld project ready for planning (import part, create and apply weld settings, enable/disable appropriate welds, set project options, etc.)
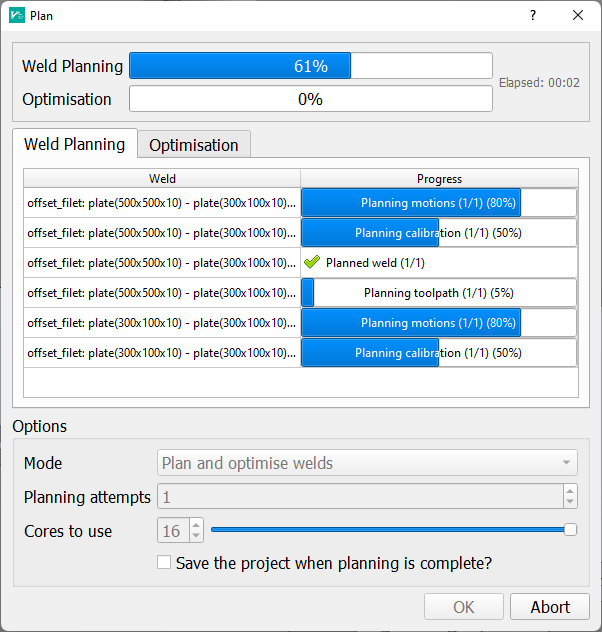
Press the Plan button.
Select how many times to attempt to plan each weld.
Press the plan button.
Wait for planning to complete.
Our planning algorithms are separated into two phases, planning and optimisation. The planning stage attempts to create the paths required for the weld, the optimisation stage then optimises the robot paths to avoid unnecessary motions where possible.
Planning Settings
Mode Configures the planning mode between:
Plan and optimise welds will attempt to plan all enabled welds, then optimise when planning has been completed.
Plan only will only attempt to plan enabled welds. Optimisation will not occur.
Optimise only will optimise already planned welds. Will not attempt to plan any enabled welds that are not planned.
Planning attempts The number of attempts the planner will make to successfully plan a weld. A value of between 3-5 is suggested.
Cores to use will limit the number of CPU cores the planner will use. By default the planner will use all available CPU cores which may leave your computer unresponsive.
Save the project when planning is complete Verbotics Weld will save the project when planning has been completed.
The Planning Process
Planning is performed within Verbotics Weld in the following order:
Create weld paths.
Create approach and retreat motions.
Create path finding actions (if enabled). This includes the approach and retreat motions for each sensing action and the motions between each sensing action.
Create robot motions (home to path finding, path finding to weld, weld to home etc).
Paths are validated and re-checked for collision and kinematic problems.
If any of these sub-processes fail the overall weld is failed and will not be exported.
Verbotics Weld uses probabilistic techniques to plan the paths required. This means that each plan may have different results. If a certain path is not suitable it can be cleared and re-planned.
Create Weld Paths
The planner attempts to create a weld path based on the weld settings applied to that weld. The planner will stay within the bounds of the torch angles as set and attempt to produce a path close to the optimum angles set.
Create Approach and Retreat Motions
Once the weld path is complete, the approach and retreat positions are created. These have slightly different collision constraints as the weld may be in a slightly different position depending on the accuracy of the robot, the cell setup and the part.
Create Path Finding Actions
path finding actions are created if they are enabled. In this process the workpiece geometry is analysed to determine areas that can be used for touch or laser sense (laser sensing is under development) path finding. This process will fail if certain criteria are not met.
Create Robot Motions
This process in the planner creates all the motions between each action (path finding, weld, home).
Validation
The final process is to validate all paths. This will recheck all paths for collision and kinematic problems. If any are found the weld plan is marked as failed.
Optimisation
When optimising welds, Verbotics Weld will complete the following processes:
Attempt to re-plan the weld in the same robot configuration as the previous weld if this setting is enabled.
Attempt to unwrap any joints (robot or external) with more than 360° of rotation so it matches the previous weld.
Attempt to shortcut motions paths (for example go from one weld, straight to the next if it not required to go home).
Tip
Use the Optimise only planning mode prior to generating your code. This will allow Verbotics Weld to shortcut paths and minimise the change in robot pose between subsequent welds.